
 Зональная навигация, или RNAV (Area Navigation) в последние годы успешно вытесняет традиционные методы навигации с использованием наземных радиосредств. Сегодня на авиационных частотах очень часто можно услышать команду диспетчера «CLEARED DIRECT TO», что означает «разрешаю полет прямо на», при этом точка пути, на которую разрешается полет, как правило, не маркирована наземными радиосредствами, а просто задана координатами. Такую команду возможно выполнить только с применением бортового оборудования RNAV. Зональная навигация широко применяется на всех этапах полета, включая самый ответственный — заход на посадку. В перспективе, с развитием спутниковых навигационных систем, зональная навигация полностью вытеснит традиционные методы навигации.
Зональная навигация, или RNAV (Area Navigation) в последние годы успешно вытесняет традиционные методы навигации с использованием наземных радиосредств. Сегодня на авиационных частотах очень часто можно услышать команду диспетчера «CLEARED DIRECT TO», что означает «разрешаю полет прямо на», при этом точка пути, на которую разрешается полет, как правило, не маркирована наземными радиосредствами, а просто задана координатами. Такую команду возможно выполнить только с применением бортового оборудования RNAV. Зональная навигация широко применяется на всех этапах полета, включая самый ответственный — заход на посадку. В перспективе, с развитием спутниковых навигационных систем, зональная навигация полностью вытеснит традиционные методы навигации.
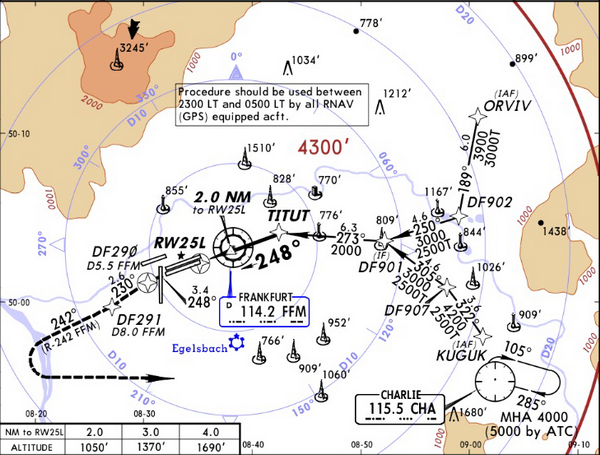
Схема захода на посадку RNAV в аэропорту Франкфурта.
Преимущества над традиционной навигацией.
Прежде всего необходимо определить понятие RNAV.
Зональная навигация (RNAV) – это метод навигации, позволяющий воздушным судам выполнять полет по любой желаемой траектории в пределах зоны действия радиомаячных навигационных средств или в пределах, определяемых возможностями автономных средств, или их комбинации (определение ИКАО).
В прежние дни маршрут полета должен был проходить строго через радионавигационные средства, другими словами, на каждом участке маршрута должно было обеспечиваться радионавигационное наведение. Очевидно, что при применении такого метода навигации, увеличивается длина маршрута, а значит и итоговая стоимость перевозки.
Маршрут полета, основанный на наземных радионавигационных средствах (РНС).
Возможность выполнять полет без привязки к РНС дает целый ряд преимуществ. В первую очередь это значительное уменьшение времени полета, т.е. прямая экономия на топливе и других расходах связанных с эксплуатацией воздушного судна. При выполнении полета с использованием оборудования RNAV не требуется широкой сети наземных радионавигационных средств, к слову, содержание одного радиомаяка VOR обходится около 100 тысяч долларов в год. Кроме того, применение RNAV позволяет эффективнее использовать воздушное пространство, тем самым увеличивая его пропускную способность.
Определение места воздушного судна в системах RNAV.
Основой любой бортовой системы RNAV является датчик, способный с достаточной точностью определять координаты воздушного судна (как правило, в системе координат WGS-84) и навигационная база данных (о ней речь пойдет дальше).
Первые системы RNAV, хоть и не являлись полноценными системами в их сегодняшнем понимании, работали только от РНС и позволяли выполнять полет вне трасс при условии нахождения в радиусе действия нескольких радиомаяков VOR/DME. На пульте управления системы устанавливались частоты радиомаяков, а маршрут задавался точками определенными радиалами и дальностью.
Длительное время широко применялись системы дальней навигации, в частности LORAN-C. В отсутствии спутниковых навигационных систем, других способов определения места воздушного судна при полете через океан не было. Системы дальней навигации, основанные на наземных радиостанциях (их еще называют гиперболическими), позволяли определять географические координаты воздушного судна с относительно высокой точностью (для LORAN-C около 500 метров). Дальность действия LORAN-Cсоставляла до 2500 километров.
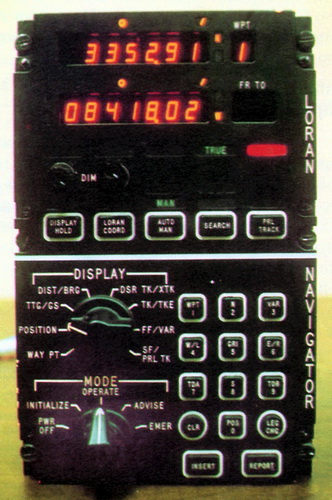
Бортовое оборудование системы LORAN-C.
Как это ни странно, основным источником информации о местоположении в современных бортовых навигационных системах является не спутниковая навигационная система, а инерциальная навигационная система. Смысл такого решения прост. Инерциальная система хоть и имеет свойство накапливать погрешность, но у нее есть один неоспоримый плюс: она полностью автономна. К тому же, за счет применения лазерных гироскопов и акселерометров, современные IRS (Inertial Reference System) имеют довольно высокие показатели точности, уход составляет не более 1-2 морских миль за час полета.
Не стоит забывать, что система GPS контролируется министерством обороны США. Известны случаи, когда Пентагон исключал определенные регионы из зоны покрытия системы либо снижал точность определения координат. Однако, для того, чтобы IRS обеспечивала необходимую точность определения координат, ее необходимо периодически корректировать по более точным координатам, как правило, это GPS или наземные радиомаяки DME/DME. Маяки VOR/DME и DME/DME могут выступать самостоятельными датчиками координат для системы RNAV.
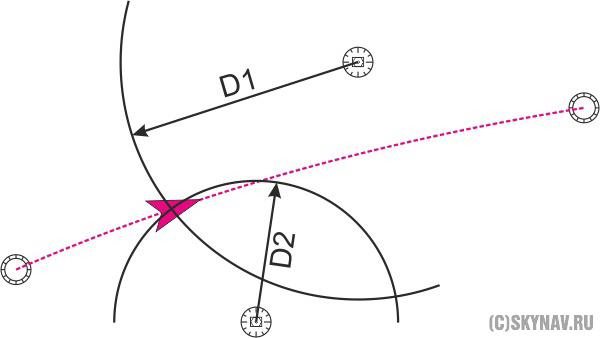
Принцип определения координат по двум дальномерным радиомаякам DME.
Второе местоположение исключается компьютером системы RNAV.
В перспективе планируется полностью отказаться от наземных радиосредств и перейти на GNSS (Global Navigation Satellite System), которая включает уже действующие системы GPS и ГЛОНАСС, в 2016 году планируется запуск европейской системы GALILEO. Одновременное использование нескольких независимых СНС позволит значительно улучшить точность и надежность навигации методом RNAV.
Бортовое оборудование RNAV.
Поскольку инерциальной навигационной системой оборудуются, как правило, только тяжелые воздушные суда, осуществляющие коммерческие перевозки, наиболее широкое развитие получили системы RNAV, в которых единственным датчиком координат является GPS. В этом случае приемник GPS должен иметь функцию RAIM.

Garmin GNS-430. Один из самых распространенных авиационных приемников GPS.
Устанавливается, как правило, на легкие воздушные суда.
Большинство современных самолетов коммерческой авиации оборудуются комплексной системой управления полетом. На самолетах разных производителей ее называют по-разному: FMC – flight management computer (Boeing), FMGS – Flight Management and Guidance System (Airbus). Именно через эту систему и ее пульт управления (СDU – control display unit) в числе прочего функционала реализуются возможности оборудования RNAV.

Навигационный дисплей и пульт управления FMC самолета Boeing-737NG.
Оборудование RNAV обеспечивает ряд характерных для данного метода навигации функций:
- индикация координат воздушного судна и информации об их точности
- непрерывная индикация навигационных параметров, включая линейное боковое уклонение (ЛБУ), путевую скорость, расчетное время полета и расстояние до активной точки пути, фактический путевой угол, пеленг на активную точку пути
- индикация информации о ЛБУ на CDI (Course Deviation Indicator), выдача сигналов в автопилот
- функция «DIRECT TO» (выбор любой точки пути из навигационной базы данных и полет на нее из текущего местоположения)
- функция создания последовательности точек пути (плана полета)
- осуществление полета параллельно линии заданного пути (OFFSET) с определенным ЛБУ
Точки пути. Базы данных.
Маршрут зональной навигации строится на основе точек пути (WPT–Waypoint), точка пути задается координатами в системе координат WGS-84. Существует два вида точек пути: FLY-BY и FLY-OVER, их пролет осуществляется с упреждением или без него. Все маршрутные точки имеют тип FLY-BY, точки FLY-OVER применяются в основном на аэродромных схемах, например точки ухода на второй круг, точки определяющие зону ожидания.
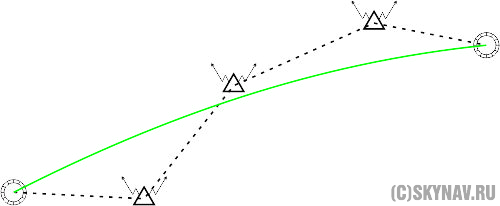
Обозначение и правила пролета точек FLY-BY и FLY-OVER.
Навигационная база данных систем RNAV в обязательном порядке обновляется в соответствии с циклами AIRAC каждые 28 дней. Формат, в котором кодируется навигационная информация, зависит от производителя и модели конкретного оборудования. Наиболее широкое распространение получил формат данных ARINC-424.
В базе данных каждой точке задается координатами, также ей присваивается признак fly-by или fly-over, а для каждого участка маршрута указываются требования к его выполнению в соответствии с концепцией PATH TERMINATOR, в соответствии с которой участки обозначаются двумя буквами, где первая означает метод выполнения полета на участке, а вторая окончание участка. Например TF – track to fix, или CA – course to altitude. Всего существует 22 варианта типовых участков, которые позволяет закодировать ARINC-424.
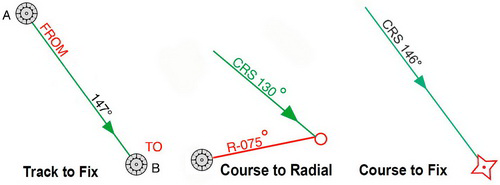
Примеры некоторых типовых участков в соответствии с форматом данных ARINC-424.
Точность навигации RNAV.
К оборудованию RNAV предъявляются определенные требования по точностным характеристикам и надежности. Эти требования сформулированы в концепции PBN (Performance Based Navigation), требования по точности выражаются в морских милях допустимого бокового уклонения, например навигационная спецификация RNP-10 (RNP — Required Navigation Performance) означает, что с вероятностью 0,95 полет должен проходить в пределах +-10 морских миль от оси трассы.